
2026年3月,郭雷在北京接受《环球人物》记者采访。(本刊记者 侯欣颖/摄)
郭雷
1966年出生于山东曲阜。全国人大代表、中国科学院院士、北京航空航天大学教授。长期从事抗干扰控制理论与仿生智能技术领域的研究,带领团队为我国航空航天事业提供关键技术支撑,显著提高了多类智能无人系统装备的抗干扰能力。
“人工智能”是当下最火的话题,那你听说过“鸟工智能”“鱼工智能”吗?
“在平日生活中,大家比较熟悉的是以大数据、大模型为代表的类脑智能技术,比如DeepSeek、豆包等。但在航空航天、国防军工等领域,比如火箭、卫星、无人机,它们不一定需要超强的计算能力,而是需要敏锐的空间感知能力和灵活的运动控制能力。在这方面,我们要向虫、鸟、鱼等动物学习,发展仿生智能。”中国科学院院士、北京航空航天大学教授郭雷对《环球人物》记者说。

2026年3月,郭雷(左)在北京航空航天大学和科研人员交流。(本刊记者 侯欣颖/摄)
从抗干扰控制理论,到仿生智能技术,20多年来,郭雷始终坚持把原始创新和国家需求当作科技创新的指挥棒。今年两会,他作为全国人大代表,关心的依旧是“新硬科技”的发展:“我们要推动空天仿生智能等前沿交叉领域基础理论、关键技术和工程应用全链条创新,加快推动低空经济、商业航天和具身智能等产业发展。”
机器要像动物一样进化
2025年底,南京部分区域一度出现手机导航定位位置异常现象,原因是区域性用户信号频率受到干扰。尽管持续时间比较短,仍在网上引发广泛关注。
郭雷对此也很关心。“我一直从事的就是抗干扰控制理论研究。天上飞的无人机,水下游的潜水器,还有现在热门的机器人,这些运动体在实际应用中都需要很强的抗干扰能力,都是我们的研究对象。”
在郭雷看来,我国的火箭、卫星、无人机,甚至机器人等无人系统,目前大多局限于“预设任务、理想环境、确定模式”,还不能看作真正的智能系统。在实际应用中,几乎所有无人系统都会面临来自内部的、外部的、主动的、被动的多源干扰与不确定性。“未来的飞行器能应对各类干扰和不确定因素,在多约束、高动态、强对抗的条件下适应环境、抵御干扰、制胜天敌。”
该如何实现这个目标呢?郭雷想到了自然界的动物,动物在亿万年的进化过程中,练就了一身“硬本领”——抵御病毒侵袭、适应环境剧变、躲避天敌侵害、应对种群竞争,这些能力都是动物神经、器官、组织和行为智能的综合体现,也是人类工程技术难以企及的“自然智慧”。
一只鸟无需复杂而耗能的程序,就能在狂风中灵活转向、精准觅食。郭雷说,空天仿生智能研究就是将轻量化的学习、预测和进化算法,融入飞行器的传感器、执行器和系统行为中,最终实现“脑聪、目明、手巧、身健”的目标。“为了区别于大家熟知的人工智能,我们也亲切地将它戏称为‘鸟工智能’。仿生智能的目标,就是提升无人系统的行为智能与运动智能,让飞行器也能像鸟一样乘风而行,提升它们在各类不确定环境下的安全性、绿色性和进化能力。”
蜻蜓能迅速捕捉飞蚊,“如果将其运动轨迹规划、姿态控制方面的能力和火箭技术相结合,前景非常广阔”。仿螳螂虾的无人系统则可以将控制、感知和探测进一步结合,实现对自身、环境和目标信息的“灵动”感知与控制,以完成水下环境任务——这被称为“鱼工智能”。
引领抗干扰控制理论新方向
郭雷1966年出生在山东曲阜的一个教师之家,家住阙里步行街旁。18岁那年,他虽然高考成绩在县里名列前茅,但还是选择了家门口的曲阜师范学院(今曲阜师范大学),进入数学科学学院就读。
“那时,曲阜师范学院数学系实力挺强的,好几位老师是华罗庚先生的学生。”郭雷说,他的硕士生导师是航天力学专家竺苗龙教授,受其影响,自己硕士毕业论文写的是小推力卫星最佳轨道设计方法。“那时我做了一些航空航天方面的研究,没想到时隔许多年,我会真正投身于此。”
这期间,郭雷遇到了对他影响极深的老师——著名自动控制学家、中国科学院院士冯纯伯。
冯纯伯生于1928年,成长于炮火纷飞的战乱年代,最明白什么叫“国家需要什么就做什么”。三峡工程之初,他负责组建电力系统综合实验室;1960年中苏关系破裂后,他参与某型导弹的研制工作;他提出的技术方案可使雷达重量减轻1/3;被调入南京工学院(今东南大学)后,他开始为祖国培养自动控制理论人才。
1994年,郭雷到东南大学读博,师从冯纯伯。“早在上世纪80年代,冯老师就带着团队开始研究神经网络和机器人,这都是现在的大热门。我的研究方向是鲁棒控制,就是抗干扰控制理论。”
鲁棒控制是一种控制系统设计方法,其目标是使控制系统在面临参数摄动、外部干扰、建模误差等不确定性因素时,仍能够保持其期望的性能特点。
读博期间,郭雷在鲁棒H无穷控制方向发表了不少论文,在许多人看来,他取得了不错的学术成就。可有一天,冯纯伯问他:“我们研究的核心是要解决别人解决不了的问题。你的研究到底能解决什么问题?”自那开始,郭雷就下了决心,学术研究一定要看原始创新!
后来,他带着老师的问题,去了法国、英国等国家,与国外的科研机构开展合作研究。在英国拉夫堡大学航空系,郭雷和合作者针对机器人和无人机的实际问题,撰写了国际上第一篇关于“干扰的同时抑制与补偿”问题的文章。目前,这项成果已经成为国际控制和智能科学领域的引领性理论方法。
经过20多年的努力,郭雷带领团队原创性地提出了精细抗干扰控制理论。对于无人系统而言,干扰与不确定性,正是控制和智能科学的核心理论难题。在此基础上,他们还系统地提出了多源干扰系统精细控制、复合干扰滤波和动态闭环不确定性量化等一系列理论方法,成功建立了从“抗干扰”到“识干扰”“用干扰”的完整理论体系,让复杂系统既能抵御外界干扰,还能“读懂”干扰、利用干扰,变得更加灵活智能。
如今,郭雷团队的多源干扰系统精细估计与控制理论和技术不仅被应用于航空航天,在精密制造、能源电子、具身智能等领域都发挥着重要作用,在国际上也具有重要的影响力。他们团队的综述文章长期位居国际知名期刊《IEEE工业电子汇刊》受欢迎论文第一名,被评价为相关领域“最流行”“最有用”“最重要”的理论方法之一。
让无人机“内外兼修”
理论的意义在于指导实践。“作为一名科技工作者,最大的幸福就是自己的理论方法和技术能为国家重大工程作出贡献,把论文写在祖国大地上。对于控制学科而言,理论方法只有在实践中发挥了作用,解决了别的理论解决不了的问题,才能流传下去。”郭雷说。
2006年进入北京航空航天大学工作后,郭雷在抗干扰控制理论研究的基础上,围绕国家航空航天领域在干扰拒止环境下的导航和控制难题,开展关键技术攻关和工程应用研究。
谈起仿生智能的应用,郭雷尤其兴奋。他说,仿生智能绝不是“纸上谈兵”的算法研究,而是一门实打实的硬科技,不仅需要修炼算法的“软功”,更要夯实器件和系统的“硬功”,做到内外兼修、软硬一体,这样才能让飞行器真正拥有“生命力”,更聪明、更自在地翱翔于天空。
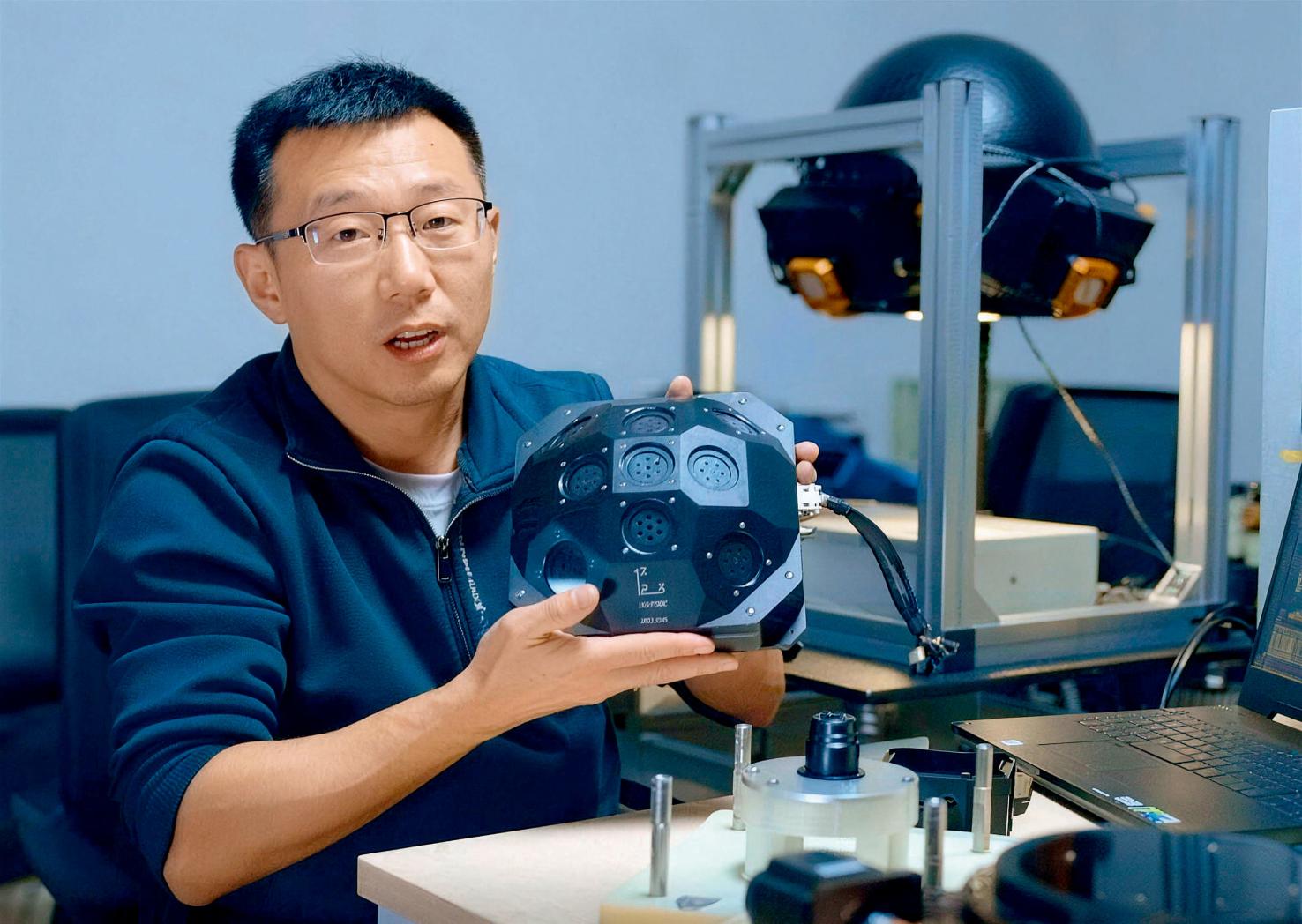
郭雷团队科研人员展示仿复眼智能偏振导航系统。(视频截图)
比如,郭雷团队认识到,蜜蜂拥有与生俱来的高超导航能力,既能四处觅食,又能精准返回蜂巢,即便环境复杂也不会迷路。团队破译了蜜蜂等昆虫复眼对光场的感知机理,成功研制出一系列新型仿复眼智能导航传感器。更进一步,他们还结合不同昆虫和候鸟对光学、地磁、重力等多物理场信息的感知与融合能力,设计了抗干扰信息融合算法和软件,研制出仿复眼组合导航装置——相当于给无人机安上一双“慧眼”。这双“慧眼”能让无人机“看见”和“听见”人类看不见的偏振光、地磁场等信息,哪怕在卫星信号被屏蔽的拒止环境下,也能自主导航、精准飞行。
郭雷团队还让无人机练就一身“鹰爪功”。“老鹰在空中抓捕猎物时,动作迅猛、精准有力、节省能量,既能牢牢抓住猎物,又能保持自身稳定和平衡。我们通过细致观察其抓捕时的肌肉收缩、关节活动规律,模仿这一行为机制,研制出无人机灵巧作业机构,可完成空中抓取、旋拧等精细动作,让无人机从会飞升级为会做,大幅提升了实用性。”
即便面对极端环境,郭雷团队也有解决方案。海燕能够在风暴中翱翔,它们可以通过感知风向和风力灵活调整姿态。团队模拟鸟类在极端环境下的飞行控制行为,提出了无人机抗风、抗雨及容损控制方法和软件,研制出飞行安全与免疫控制装置,显著提升了其在复杂干扰下的生存能力与飞行安全性。
“我们团队所有的研究和努力,只为实现一个目的——让祖国的飞行器能够具备更强的抗干扰能力、在风暴中御风而行。”郭雷说。过去的几年中,无论是西北边陲的试飞基地,还是南海和东海的前沿海域,都留下了团队成员做实验的身影。

郭雷的办公室摆放的书法作品。(本刊记者 许晔/摄)
在他的办公室里,两幅字静静挂在墙上,一幅是冯纯伯写的“求是创新,自强不息”,另一幅是友人送的毛泽东诗词“天若有情天亦老,人间正道是沧桑”。墨色沉凝,如同岁月的坐标,标定着一位科学家的初心与征途。
《环球人物》记者 许晔
 责任编辑:高玮怡
责任编辑:高玮怡声明:版权作品,未经《环球人物》书面授权,严禁转载,违者将被追究法律责任。
我要纠错

